





The time-derivative of signal  can be written as the derivative of the inverse Fourier transform,
can be written as the derivative of the inverse Fourier transform,
(1) 
Pulling the derivative  through the integral in (1) results in
through the integral in (1) results in
(2) 
The derivative of the complex sinusoid can be written as
(3) 
Substituting the derivative (3) into (2) can be written as
(4) 
The signal derivative (4) can be rewritten using the inverse Fourier transform operator  such that
such that
(5) 
A frequency-domain derivative filter is defined as
(6) 
such that (5) is
(7) 
The product of two frequency-responses A(f) and B(f) are related through the Fourier transform to the convolution  of their impulse-responses a(t) and b(t)
of their impulse-responses a(t) and b(t)
(8) 
The signal derivative (7) can therefore be written as the convolution of two impulse-responses, the signal x(t) and the derivative filter h(t),
(9) 
The impulse response of the derivative filter is defined through the inverse Fourier transform
(10) 
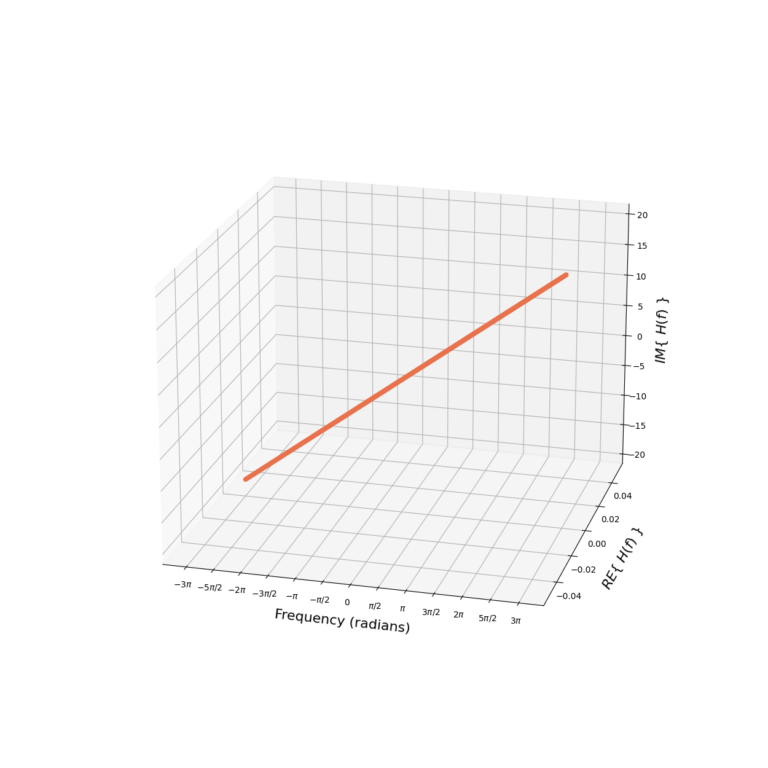
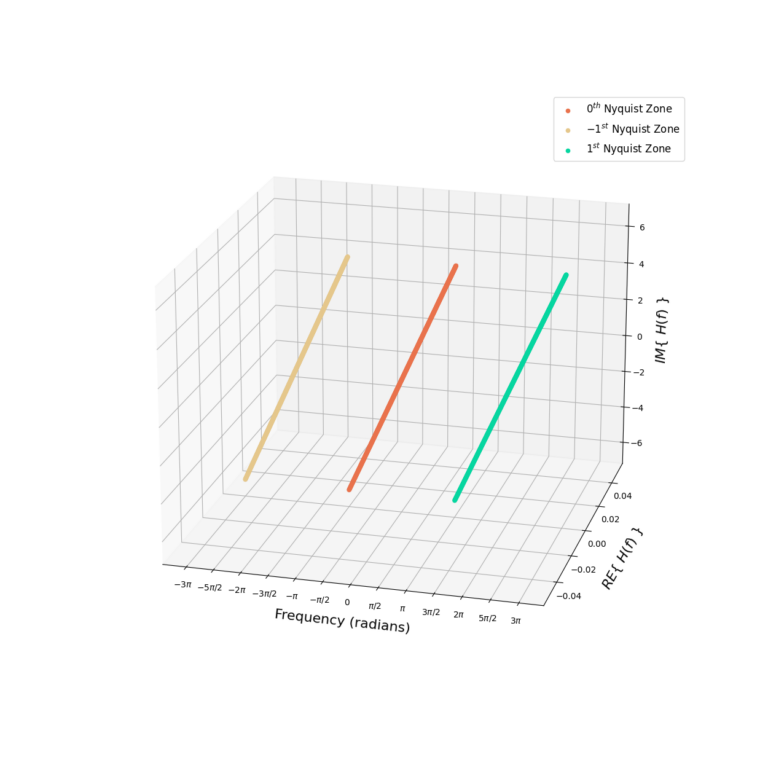
Figure 1 is a 3D plot of the frequency-response H(f) for some values of f where
(11) 
(12) 
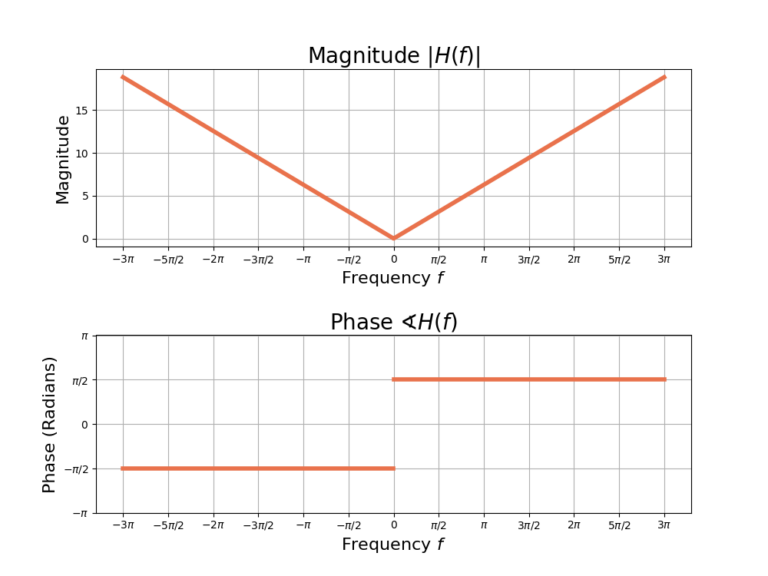
The magnitude  and phase
and phase  of the derivative filter are given in Figure 2.
of the derivative filter are given in Figure 2.
A discrete-time implementation of  from (6) is created by truncating the frequency response. Where H(f) is defined over
from (6) is created by truncating the frequency response. Where H(f) is defined over  the discrete-time Fourier transform (DTFT) is defined by
the discrete-time Fourier transform (DTFT) is defined by
(13) 
where
(14) 
The sampling rate defines the amount of truncation such that  is defined over
is defined over  or equivalently
or equivalently  .
.
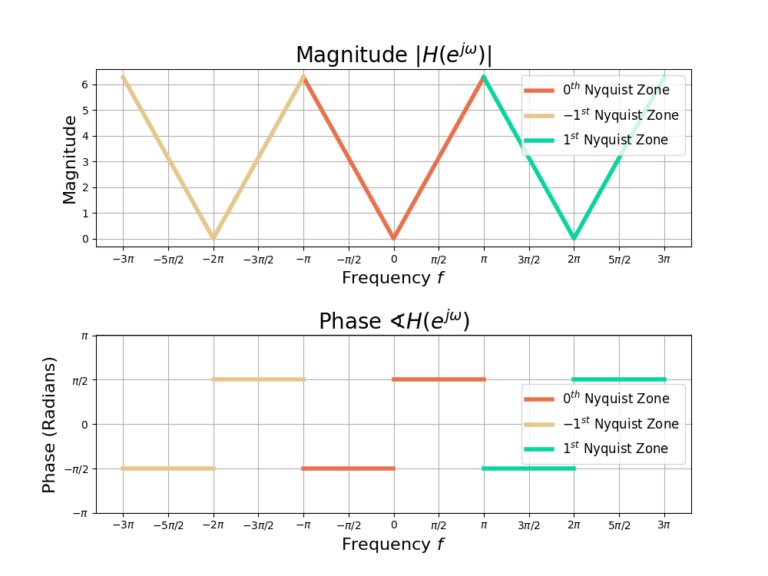
Figure 3 gives the frequency-response for the discrete-time derivative filter. The frequency-response is periodic in  and three repetitions are shown, denoted as Nyquist zones -1, 0 and 1. Figure 4 is the magnitude and phase which also shows three Nyquist zones.
and three repetitions are shown, denoted as Nyquist zones -1, 0 and 1. Figure 4 is the magnitude and phase which also shows three Nyquist zones.
The continuous-time frequency-response H(f) in (6) was mapped into discrete-time in (13). The inverse DTFT is used to transform into the impulse-response h[n] where the inverse DTFT is given by [oppenheim1999, p.48]
(15) ![\begin{equation*}h[n] = \frac{1}{2\pi} \int_{-\pi}^{\pi} H(e^{j\omega}) e^{j\omega n} ~ d\omega.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-378473eac87a9d3d938335788c0adcce_l3.png "Rendered by QuickLaTeX.com")
Substituting  from (13) into (15) results in
from (13) into (15) results in
(16) ![\begin{equation*}h[n] = \frac{1}{2\pi} \int_{-\pi}^{\pi} j \omega e^{j\omega n} ~ d\omega.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-6b5b53d97a3afd15febc351ade1cb64c_l3.png "Rendered by QuickLaTeX.com")
The inverse DTFT integral (16) can be solved through the use of integration by parts. Define u and v according to
(17) 
Integration by parts of the inverse DTFT integral (16) is defined as
(18) ![\begin{equation*}h[n] = \frac{j}{2\pi} \left( u \cdot v \Big|_{-\pi}^{\pi} - \int_{-\pi}^{\pi} v ~ du \right)\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-f32ec8a4722747531c16d4d5ce0d617c_l3.png "Rendered by QuickLaTeX.com")
and substituting (17) into (18) results in
(19) ![\begin{equation*}\begin{split}h[n] & = \frac{j}{2\pi} \left( \frac{\omega}{jn} e^{j\omega n} \Big|_{-\pi}^{\pi} - \int_{-\pi}^{\pi} \frac{1}{jn} e^{j\omega n} d\omega \right) \\& = \frac{\omega}{2\pi n} e^{j\omega n} \Big|_{-\pi}^{\pi} - \frac{1}{2\pi n} \int_{-\pi}^{\pi} e^{j\omega n} d\omega. \end{split}\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-f441b20376c715d4ac6ce355ec512298_l3.png "Rendered by QuickLaTeX.com")
The first part of (19) can be simplified as
(20) 
Equation (20) can be simplified to
(21) 
The term  can be written as
can be written as
(22) 
for all n, however evaluating (21) at n=0 must be done through L’Hopital’s rule,
(23) 
Using (23) and (22), equation (21) is written as
(24) 
The second part of (19) is
(25) 
which can be simplified by a trigonometric identity to
(26) 
The term  can be reduced to
can be reduced to
(27) 
for all n, however evaluating (26) at n=0 must be done through L’Hopital’s rule. Applying L’Hopital’s Rule on (26) is
(28) 
which still cannot be evaluated at n=0 and therefore the rule is applied once more,
(29) 
![\begin{equation*}h[n] = \begin{cases}\frac{(-1)^n}{n}, & n \neq 0 \\0, & n = 0\end{cases}\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-f9b2523548f612b424e12ebcb2b386a1_l3.png "Rendered by QuickLaTeX.com")
![Figure 5: Impulse response of the derivative filter h[n] for -32](https://www.wavewalkerdsp.com/wp-content/uploads/2021/11/derivativeFilterDerivation_derivativeFilterImpulseResponse-1-768x576.png)
![Figure 6: Magnitude and phase of the frequency response for F( h[n] ).](https://www.wavewalkerdsp.com/wp-content/uploads/2021/11/derivativeFilterDerivation_derivativeFilterFreqResponse-768x576.png)
2 Responses
Oh no! My entire career in DSP contradicts your Wisdom: “If you need to do something in DSP it’s best to do it with a filter.” Here “filter” means “linear time-invariant system,” which means the input and output of the “something” is a convolution, and convolutions are linear. But cyclostationary signal processing, spectrum estimation, frequency translation, and many signal-parameter estimators involve nonlinear operations. We need some more Wisdom to cover those of us working on the fringes of DSP–I agree that linear time-invariant systems are foundational, but what about us poor nonlinear signal processors?? 🙂
Good catch! I’m trying to move people away from just throwing NumPy at a DSP problem without thinking about how it would impact the impulse and frequency responses. I agree that non-linearities are useful in DSP but they need to come with a safety warning.
There’s a lot of goodness to be had just by averaging through filtering, and I put things like CSP and spectral estimation into that general bucket. I’m using “filter” loosely, broader than just LTI systems. Correlation, convolution and FIR filters all feel like they are siblings and that’s what I’m trying to get at when I say “use a filter”.