
![Figure 1: The weights of the partitioned half band filter hA[n] and hB[n].](https://www.wavewalkerdsp.com/wp-content/uploads/wordpress-popular-posts/2226-featured-125x100.png)






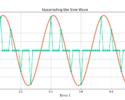
The single pole IIR filter is incredibly efficient and can be a great stand-in for a moving average filter! In this blog I describe how to derive the 3 dB bandwidth of the IIR filter to be equivalent to a moving average filter by designing the  weight. The design process builds on the IIR analysis from this DSP Stack Exchange question and my previous blog post.
weight. The design process builds on the IIR analysis from this DSP Stack Exchange question and my previous blog post.
More blog posts on DSP:
The impulse response of the single pole IIR filter is
(1) ![\begin{equation*}y[n] = \alpha x[n] + (1-\alpha) y[n-1]\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-02f7429265eb509425db6e45b2fc67fe_l3.png "Rendered by QuickLaTeX.com")
which can also be written as
(2) ![\begin{equation*}y[n] = \alpha x[n] + \beta y[n-1]\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-0082d1587302163e3a621dc3dc1417b9_l3.png "Rendered by QuickLaTeX.com")
where
(3) 
The magnitude of the frequency response of a single pole IIR filter is given by
(4) 
where the magnitude-squared is
(5) 
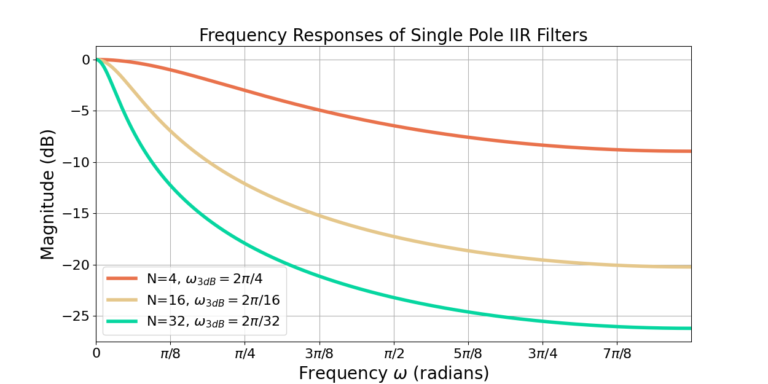
A previous blog post demonstrated how the 3 dB bandwidth of a moving average filter of length N can be approximated by
(6) 
The goal is to find the value from (1) such that the 3 dB cutoff frequency of (5) is  .
.
The 3 dB cutoff corresponds to a magnitude-squared of 1/2. The design equation is therefore
(7) 
Multiplying the complex exponential terms,
(8) 
which is simplified as
(9) 
The complex exponentials can be written in terms of cosine,
(10) 
(11) 
Multiplying the terms of (11) results in
(12) 
Substituting  ,
,
(13) 






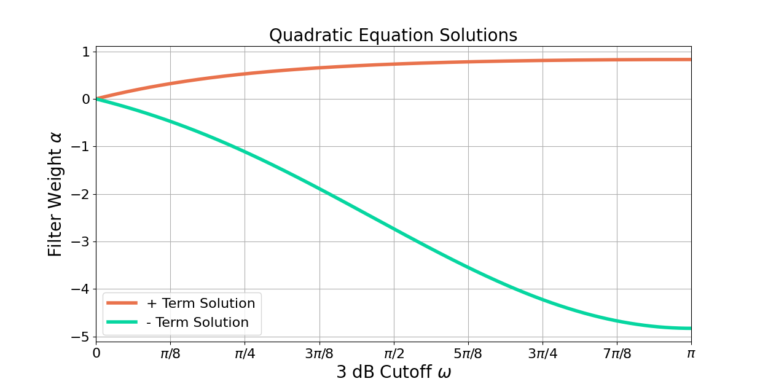
The design equation in (19) has two solutions due to the  term. Figure 1 shows the two solutions for
term. Figure 1 shows the two solutions for  .
.

2 Responses
There is an excellent paper “Low-pass filters for signal averaging” by
Edward Voigtman and James D. Winefordner. I provide the citation link below.
In it, they explain how the ideal filter for this application is the integrator, one embodiment of which is the moving average together with a proper antialiasing filter. The single-pole IIR filter unfortunately does a terrible job at the proper metric for this application which is the product of settling time x noise bandwidth. In other words, tracking of sidelobes doesn’t matter when you’re averaging; what matters is how fast it settles to the right value and how much noise it lets through.
If simplicity over performance is the target while still retaining low memory usage, you will do much much better by cascading three to six identical IIR single-lowpass of the type described in this article and adjusting the corner to meet your needs. It’s called a synchronous filter (hard to find in filter literature since it’s not a good filter for anything but averaging time series) and will approximate a Bessel filter for this data-averaging application.
Citation: 57, 957 (1986); doi: 10.1063/1.1138645
View online: http://dx.doi.org/10.1063/1.1138645
View Table of Contents: http://aip.scitation.org/toc/rsi/57/5 Published by the American Institute of Physics
Great insights and interesting paper, thank you!