
![A BPSK signal s[n], real Gaussian noise w[n], and the received signal x[n] = s[n] + w[n] for SNR = 20 dB](https://www.wavewalkerdsp.com/wp-content/uploads/wordpress-popular-posts/15621-featured-125x100.png)






An ideal low pass filter (LPF) allows signals below the cutoff frequency  to pass through unmodified with a linear gain of 1 and no phase change, while simultaneously completely rejecting all frequencies above the cutoff frequency with a linear gain of 0.
to pass through unmodified with a linear gain of 1 and no phase change, while simultaneously completely rejecting all frequencies above the cutoff frequency with a linear gain of 0.
Mathematically, the ideal LPF is defined in the frequency domain by [oppenheim1999, p.43]
(1) 
The frequency response for the ideal LPF in (1) for  is given in Figure 1.
is given in Figure 1.
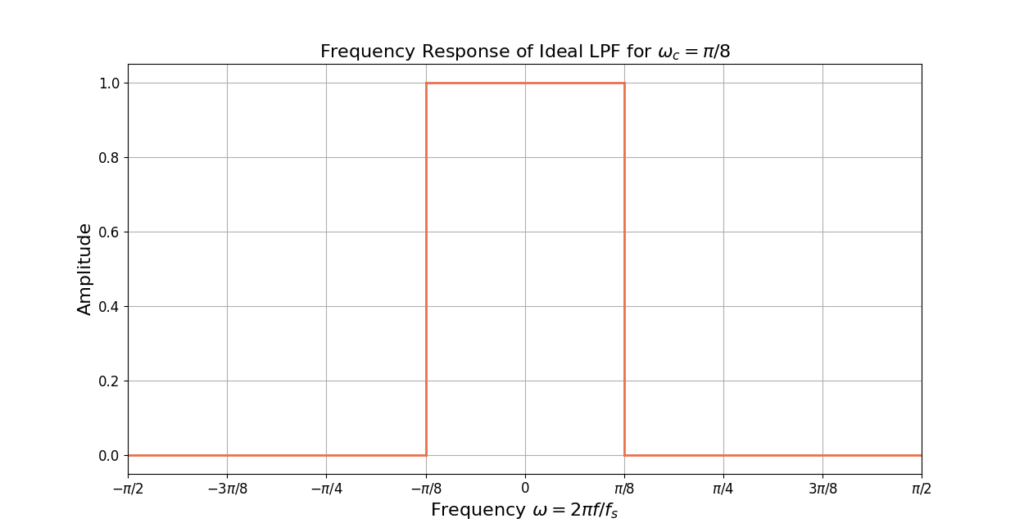
The ideal LPF in the time domain is derived by taking the inverse discrete-time Fourier transform (IDTFT) of (1),
(2) ![\begin{equation*}h[n] = \mathcal{F}^{-1} \left\{ H\left( e^{j\omega} \right) \right\}.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-2c076b16eb939298d22c39df8cd558c9_l3.png "Rendered by QuickLaTeX.com")
The IDTFT is defined as
(3) ![\begin{equation*}x[n] = \frac{1}{2\pi} \int_{-\pi}^{\pi} X\left( e^{j\omega} \right) e^{j\omega n}d\omega.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-8dafb7a6e93c5b4cf10be9339c4f08d1_l3.png "Rendered by QuickLaTeX.com")
(4) ![\begin{equation*}h[n] = \frac{1}{2\pi} \int_{-\omega_c}^{\omega_c} e^{j\omega n} d\omega.\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-28659a66d16e12635c5590478810e4b1_l3.png "Rendered by QuickLaTeX.com")
The integral in (4) is simplified via Euler’s formula as
(5) ![\begin{equation*}\begin{split}h[n] & = \frac{1}{j2\pi n} e^{j \omega n} \Big|_{-\omega_c}^{\omega_c} \\& = \frac{1}{j2\pi n} \left( e^{j\omega_c n} - e^{-j\omega_c n} \right) \\& = \frac{1}{\pi n} \sin \left( \omega_c n \right). \\\end{split}\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-41452002ff4da11d2c1cd60a5f820ad7_l3.png "Rendered by QuickLaTeX.com")
The cutoff frequency is the frequency in radians, defined as
(6) 
where  is the frequency
is the frequency  in Hz normalized by the sampling rate
in Hz normalized by the sampling rate  ,
,
(7) 
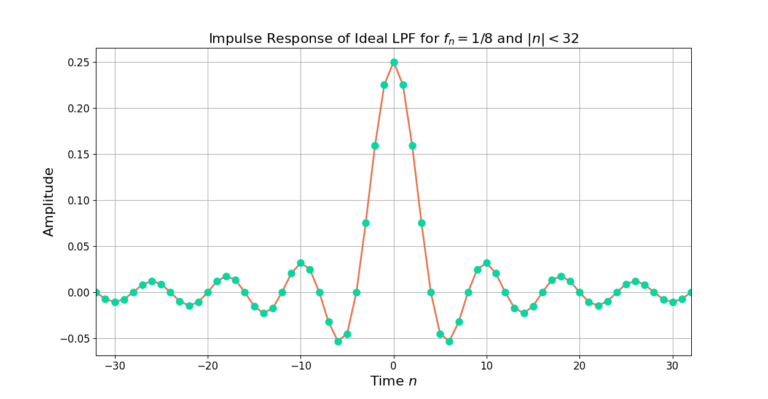
The impulse response h[n] can therefore be written as
(8) ![\begin{equation*}h[n] = \frac{1}{\pi n} \sin \left( 2\pi f_{n} n \right).\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-1846e7e60d74b08bfa9debf87f3498fa_l3.png "Rendered by QuickLaTeX.com")
Equation (8) can then be transformed into a sinc function where
(9) 
The impulse response h[n] can therefore be written as
(10) ![\begin{equation*}\begin{split}h[n] & = \frac{1}{\pi n} \sin \left( 2 \pi f_n n \right) \\& = \frac{2 f_n}{2 f_n \pi n} \left( 2 \pi f_n n \right) \\& = 2 f_n \text{sinc} \left( 2 f_n n \right) \\\end{split}\end{equation*}](https://www.wavewalkerdsp.com/wp-content/ql-cache/quicklatex.com-2b3866dc14927abe96bfef70840997b6_l3.png "Rendered by QuickLaTeX.com")
The impulse response from (10) is given in Figure 2.